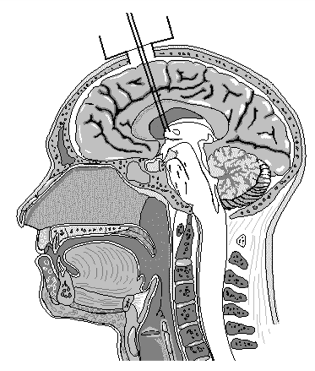
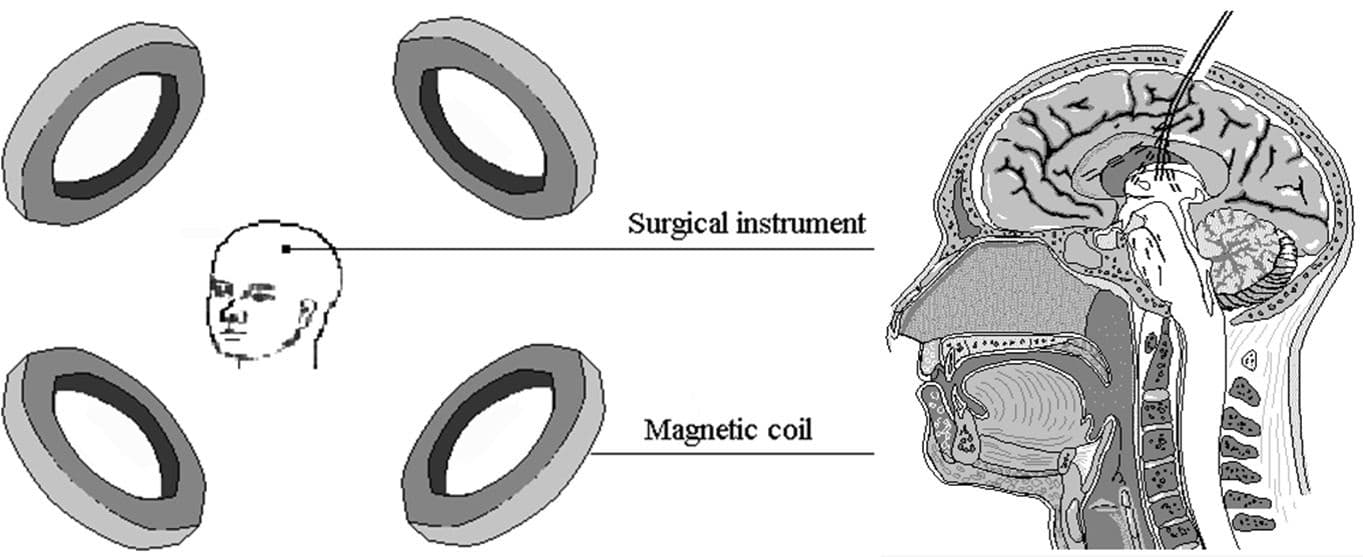
يتعلق الاختراع بنظام توجيه تجسيمي للتحكم الكهرومغناطيسي عن بُعد في أداة جراحية، يشتمل على أداة جراحية لإجراء تدخل جراحي للمريض، ووحدة لتوليد معلمات مجال مغناطيسي تتضمن بيانات تحديد موضع الموقع الجراحي، ووحدة كشف إشعاعي لرصد الموقع الجراحي وموضع الأداة الجراحية، بالإضافة إلى وحدة تحكم مهيأة لتخزين موضع الموقع الجراحي وموضع النفاذ والمسار الجراحي للأداة الجراحية، وإرسال معلمات المجال المغناطيسي إلى الأداة الجراحية لبدء الإجراء الجراحي، ثم تعديل تلك المعلمات وإعادة توليدها استنادًا إلى بيانات الموضع المكتشفة بواسطة وحدة الكشف الإشعاعي، وإرسال المعلمات المعدّلة إلى الأداة الجراحية لضمان استمرار العملية الجراحية وفق المسار والتوجيه المحددين بواسطة المعلمات المعدّلة.
وعلاوة على ذلك، يمكن للنظام توليد مواضع متعددة للملفات المغناطيسية النشطة بما يتوافق مع بيانات الموضع الدقيقة للموقع الجراحي، بحيث يتم التحكم في تموضع وتوجيه الأداة الجراحية استنادًا إلى هذه المواضع المولدة. ونتيجة لذلك، يمكن تحقيق توجيه أكثر دقة للأداة الجراحية أثناء الإجراء الجراحي، مما يسهم في تحسين دقة العملية الجراحية ورفع مستوى كفاءتها وسلامتها.
وفقًا لذلك، يمكن التحكم في حركة عدد من الملفات المغناطيسية النشطة استنادًا إلى موضع الموقع الجراحي للمريض ومعلومات موضع الأداة الجراحية أثناء الإجراء الجراحي، مع إمكانية ضبط سرعة حركة الأداة الجراحية وفقًا لحالة الموقع الجراحي وحالة المريض، بما يضمن تنفيذ العملية الجراحية بشكل مستقر وآمن وذو دقة عالية.